Возможности системы позиционирования ПЧ VF-AS3
Преобразователь частоты VF-AS3 Toshiba позволяет осуществлять контроль положения для таких применений, как управление высокоточными обрабатывающими станками, поворотными столами, складским оборудованием, перемоточными станками.

Если сравнивать ПЧ VF-AS3 Toshiba и Schneider Electric Altivar ATV930, то в продукции Schneider Electric не найдется приводов с возможностью позиционирования, которые представлены в этом обзоре. У приводов VF-AS3 (в отличии от Altivar) также есть небольшой встроенный ПЛК, возможность подчиненного управления другими 10 частотниками (Master follower control), перераспределение нагрузки на несколько двигателей.

Для намоточных и перемоточных станков доступны 2 встроенных ПИД-регулятора для регулирования скорости и контроля позиции регулятора натяжения.
Функция позиционирования имеет несколько важных возможностей работы
- блокировка вращения вала при остановках (Servo Lock)
- остановка в нулевом (заданном) положении (Zero positioning)
- остановка вблизи заданной точки при получении сигнала с датчиков с включением ПИД-регулятора
- импульсный вход (Pulse train input) для движения по шагам; остановка после отключения командных импульсов
- от точки к точке (Point to point); остановка в заданных положениях
- ориентация (Orientation); точная установка угла поворота вала шпинделя и т.п.
Выбор контроля позиционирования
| Электродвигатель | Привод | Функция позиционирования | |||||
|---|---|---|---|---|---|---|---|
| Датчик | Асинхронный | Синхронный | Опция | Нулевое положение | Импульсный вход | От точки к точке | Ориентация |
| Без датчика | не поддерживается | 6 | не требуется | Да | не поддерживается | не поддерживается | не поддерживается |
| Энкодер | 10, 11 | 12 | не требуется | Да | не поддерживается | Да | не поддерживается |
| Энкодер | 10, 11 | 12 | VEC008Z | Да | Да | Да | Да |
| Резольвер | 10, 11 | 12 | VEC010Z | Да | Да | Да | Да |

Подключение энкодера к частотному преобразователю
Схема подключения энкодера к частотному преобразователю VF-AS3 без опций
На представленной ниже схеме питание энкодера осуществляется от встроенного источника ПЧ. Если используется энкодер на 5 В или 12 В, необходимо предусмотреть соответствующий внешний источник питания.
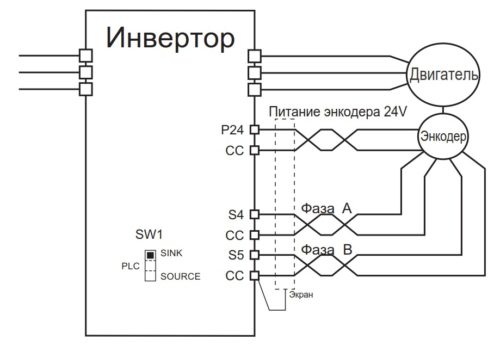
Нужно помнить об ограничении на скорость обработки входов S4/S5 (максимум 30000 имп./сек). В случае применения 1000-пульсного инкрементального энкодера с 4-х полюсным двигателем, максимальная скорость вращения ротора для этой функции составит 30000 имп. в сек/ {1000 имп. / (4пол./2)} = 60 Гц.
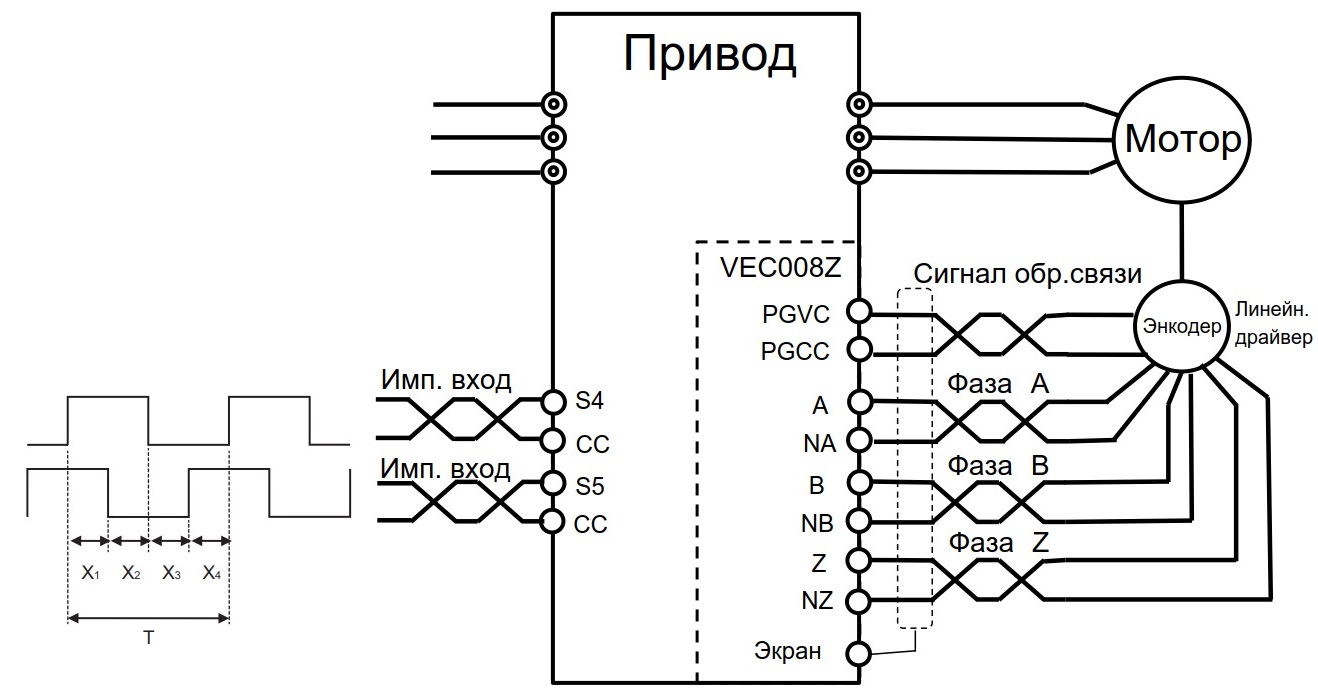
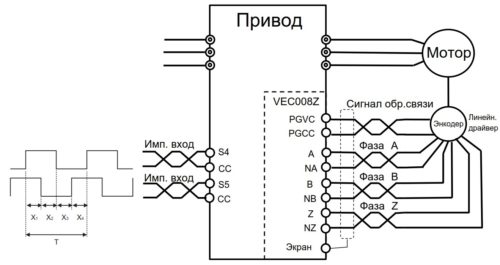
Схема подключения энкодера к частотному преобразователю VF-AS3 с опцией VEC008Z
Опциональный модуль VEC008Z позволяет подключать инкрементальный энкодер с контрольной точкой (Фаза Z). Доступные варианты питания энкодера (клеммы PGVC и PGCC): 5В, 12 В и 24 В.
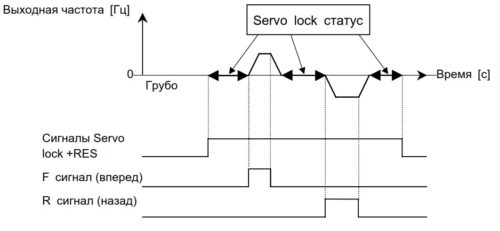
Функция блокировки вращения вала Servo lock при остановках двигателя
Как и при работе сервопривода, параметры частотника AS3 позволяют вам управлять двигателем при частоте вращения 0 Гц, просто подавая сигнал работы вперед или назад. Эти параметры используются для удержания остановившегося двигателя. Использование этого функционала возможно только при наличии энкодера на двигателе.
Обязательным условием работы этой функции является задание параметра Pt[F015] = 11 (векторный контроль с обратной связью от энкодера) и задание стартовой частоты в параметре [F240] = 0 (Гц).
Для получения этого режима любой цифровой вход (F110…F124) программируется на число 70(71). Режим SRVL (Servo lock) ON. Лучше назначать эту функцию входу RES [F113], который обычно используется для остановки двигателя.
Имейте в виду, эти параметры не предназначены для контроля положения ротора: когда нагрузка превышает мощность удержания двигателя, он будет вращаться.
Для удержания вала двигателя функция блокировки создает стартовое усилие более 150%. При этом снижается уровень тепловой защиты, как и в случае работы на низкой скорости.
Поэтому необходимо тщательно настроить следующие параметры:
- OLM [F017] — выбор характеристик теплозащиты
- tHrA [F031] — ток тепловой перегрузки двигателя
- [F606] — предел частоты снижения перегрузки двигателя
- [F607] — время перегрузки двигателя
Остановка в строго заданном положении (Zero positioning) с использованием датчиков
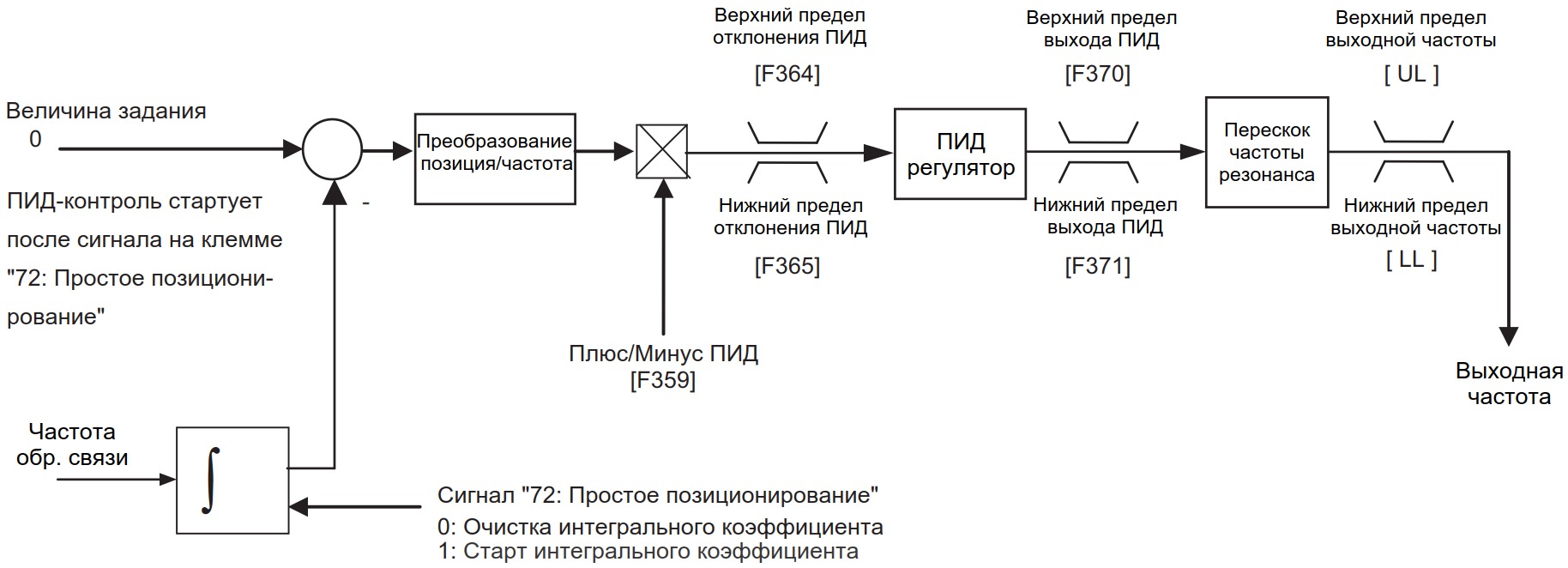
Простое позиционирование в заданное датчиком положение с уточнением с помощью ПИД-регулятора в режиме управления с датчиком скорости (энкодером) или без датчика скорости при использовании синхронного двигателя.
Когда параметр Pt [F015] = 10 (контроль с обратной связью от энкодера) или Pt [F015] = 11 (векторный контроль с обратной связью от энкодера) или Pt [F015] = 6 (контроль без обратной связи для синхронных двигателей), то позиционирование осуществляется сигналом на клемме цифрового входа [F110…F124] = 72(73) (SIMP/Simple positioning — Простое позиционирование). Т.е. при достижении датчика, подключенного к клемме с настройкой 72, привод AS3 включит режим приближения к этому датчику.
Позиционирование заканчивается, если номер импульса энкодера находится в пределах значения заданного диапазона отклонения от нуля. Этот диапазон настраивается с помощью параметра [F381] (диапазон завершения простого позиционирования). После остановки позиционирования на выходные клеммы FL_, R1_, R2_ может быть выведен сигнал с помощью назначения числа 118 (119) (Сигнал завершения позиционирования) в соответствующие параметры [F130, F132…F134, F137…F138].
Важно также настроить ПИД-регулятор на задачу позиционирования. Он настраивается в параметре [F359] = 3 (положительное ПИД-регулирование при позиционировании) или [F359] = 13 (отрицательное ПИД-регулирование при позиционировании). ПИД-регулятор не включается, пока не поступит сигнал с датчика на входную клемму с настройкой 72.
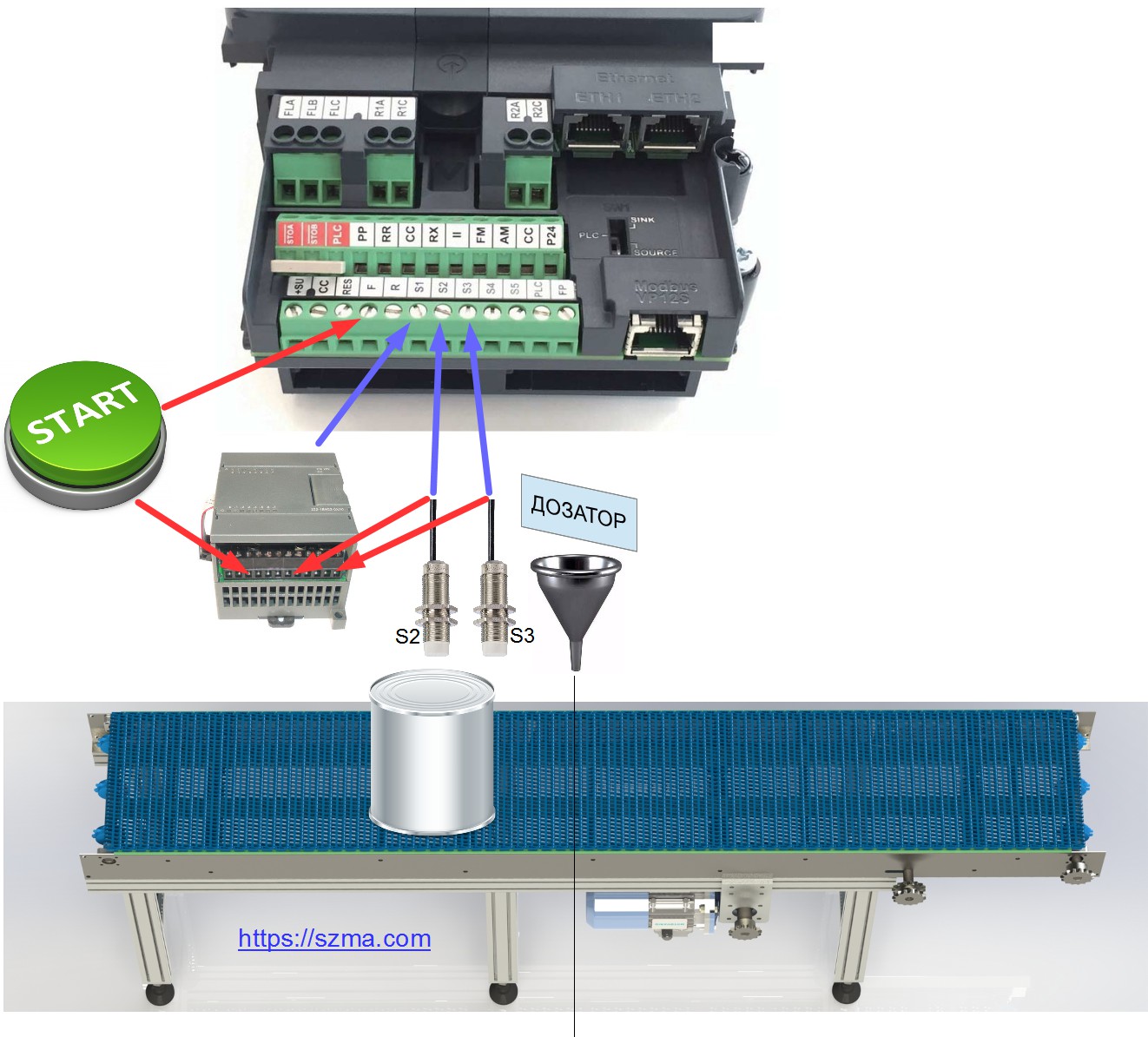
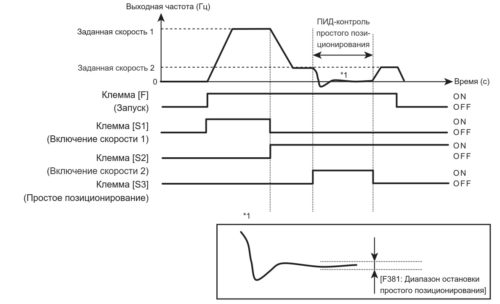
Типичный процесс позиционирования показан на диаграмме ниже. Кнопка на клемме F привода запускает двигатель с предустановленной скоростью 1, задаваемой от контроллера с помощью запрограммированного входа S1. При достижении датчика S2 запускается пониженная скорость двигателя (контроллер захватывает этот режим), предназначенная для подготовки к точному позиционированию. При достижении датчика S3 запускается процесс позиционирования (контроллер тоже захватывает этот режим), который состоит в том, чтобы с помощью возвратно-поступательных движений вернуть механизм к точке получения сигнала от датчика S3 с заданной погрешностью (диапазон остановки).
Важно! Выполнение поиска положения остановки в высокоскоростном режиме может вызвать отключение по токовой перегрузке, отключение по перенапряжению и т. д. Всегда старайтесь перейти к низкоскоростному режиму и только потом включите сигнал позиционирования.
Параметры для данного режима
| Параметр | Описание | Возможные значения |
|---|---|---|
| Pt [F015] | Настройка V/f | 6 (контроль без обратной связи для синхронных двигателей) 10 (контроль с обратной связью от энкодера) 11 (векторный контроль с обратной связью от энкодера) |
| F375 | Число импульсов на 1 оборот энкодера | Например, 1024 |
| F376 | Выбор типа датчика скорости | С опцией энкодера/резольвера или без опции |
| F377 | Обнаружение отключения датчика скорости | 1 (только для опций энкодера/резольвера) |
| F379 | Напряжение питания датчика скорости | 0 (5 В) 1 (12 В) 2 (24 В) |
| F381 | Диапазон завершения простого позиционирования | Например, 100 импульсов |
| F240 | Частота старта | 0 Гц (обязательно для этого режима) |
| F241 | Частота запуска | 0 Гц (обязательно для этого режима) |
| F243 | Частота останова | 0 Гц (обязательно для этого режима) |
Настройки ПИД-регулятора в основном сводятся к заданию следующих коэффициентов:
- [F362] — пропорциональный коэффициент
- [F363] — интегральный коэффициент
- [F364] — верхний предел изменения ПИД (для стабилизации регулирования)*
- [F365] — нижний предел изменения ПИД (для стабилизации регулирования)*
- [F366] — дифференциальный коэффициент
*Отклонение представляет собой текущую позицию, преобразованную в частоту, которая получается по следующей формуле:

Возможные проблемы
Если во время замедления при ПИД-регулировании происходит отключение по перенапряжению, уменьшите значение [F362] (пропорциональный коэффициент усиления PID1). Время замедления станет больше.
Важно! Настройка [dEC] (время замедления 1) недопустима при простом позиционировании ПИД-регулятора.
Импульсный вход для позиционирования механизма по инкрементальному энкодеру или резольверу
Алгоритм работы
- На импульсные входы (S4, S5) со смещением 90° подаются командные импульсы от управляющего устройства. Направление смещения +90° или -90° позволяет задавать направление вращения двигателя.
- На входы платы VEC008Z подаются импульсы с энкодера. Но это происходит с задержкой, потому что двигателю вначале необходимо стартовать.
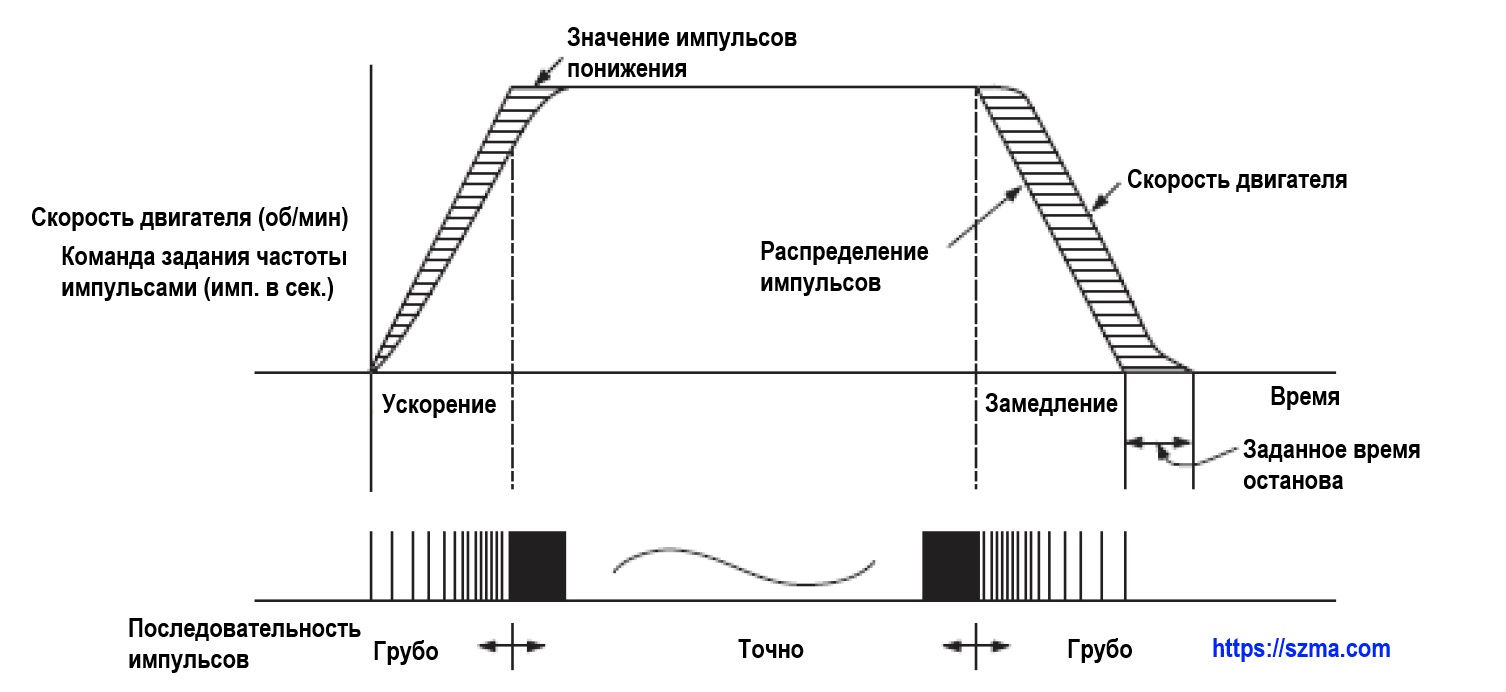
- Разница между импульсами энкодера и командными импульсами называется импульсами понижения (droop pulses), которые хранятся в специальном счетчике отклонений частотного преобразователя. Импульсы понижения являются командой установки скорости вращения при управлении положением.
- Во время работы с постоянной скоростью в счетчике отклонений присутствует постоянная величина импульсов понижения. По мере того как скорость изменяется, количество импульсов понижения также изменяется.
- Когда ввод командного импульса прекращается, импульсы понижения в счетчике уменьшаются, а скорость двигателя замедляется, затем двигатель останавливается.
- Поскольку двигатель вращается с задержкой после подачи команды по количеству импульсов понижения, он останавливается немного позже поступления команды останова (прекращения командных импульсов). Это время задержки называется заданным временем останова.
Настройка параметров частотника
При подключении опции датчика скорости (энкодера/резольвера) необходимо настроить следующие параметры частотного преобразователя:
| Параметр | Возможное значение | Описание |
|---|---|---|
| [A510] | 2 или 3 | 2 — однофазный импульсный режим управления 3 — двухфазный (квадратурный) импульсный режим управления (2 серии импульсов со смещением) |
| [F146] / [F147] | 1/0 или 0/1 1/1 | 1/0 или 0/1 — для однофазного входа S4 или S5 соответственно 1/1 — для двухфазного входа с помощью клемм S4 и S5 |
| [F114] | 178(179) | Команда готовности к позиционному контролю (PSRDY) для входа S1 |
| [F117] | 183(183) | Функция движения вперед/назад по командным импульсам (PSCMD) для входа S4 |
| [F118] | 182(183) | Функция движения вперед/назад по командным импульсам (PSCMD) для входа S4 |
Схема подключения внешней аппаратуры к инвертору для движения по управляющим импульсам
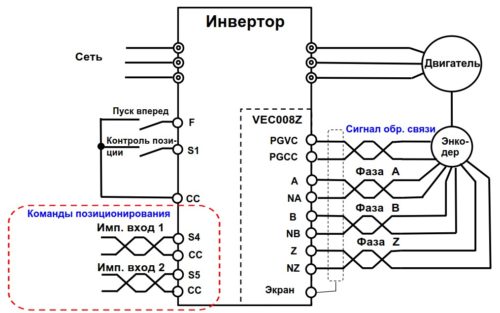
На представленной выше схеме движение двигателя по шагам начинается с подачи сигнала на вход S1 (разрешение движения по импульсам) и затем на вход F (пуск). На импульсные входы (S4, S5) со смещением 90° подаются командные импульсы от управляющего устройства. Направление смещения +90° или -90° позволяет задавать направление вращения двигателя.
Для начального разгона двигателя необходимо подавать импульсы достаточно редко. Количество поданных импульсов задает позицию вала двигателя. В процессе торможения также необходимо увеличивать временные промежутки между импульсами.
Отключение сигналов производится в обратной последовательности. После прекращения подачи командных импульсов вначале снимается сигнал с входа F, затем с входа S1.
Отключение функции позиционирования по командным импульсам
Если функция позиционирования по командным импульсам больше не требуется, необходимо выполнить очистку счетчиков импульсов.
Для очистки счетчика импульсов (позиции) задайте параметр [A537] = 0 (для очистки импульсом с OFF на ON на входе S4/S5) или [A537] = 1 (для очистки постоянным сигналом ON на входе S4/S5). Далее задайте для входов S4/S5 параметры [F117] / [F118] = 184(185) для перевода их в режим очистки и подайте соответствующий настроенному параметру [A537] сигнал на входы S4/S5.
От точки к точке. Остановка в заданных позициях
Установите параметры для системы позиционирования, такие как количество импульсов, время разгона/торможения и предварительно установленную скорость работы между точками позиций.

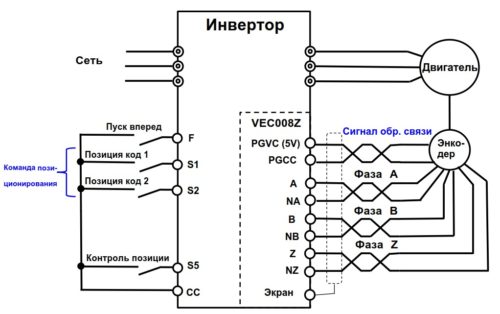
Схема подключения внешней аппаратуры к инвертору для движения по заданным точкам
Функционирование этой схемы хорошо поясняется на представленной ниже временной диаграмме.
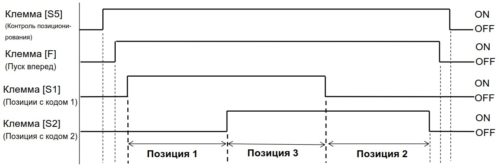
Вначале запускается контроль позиционирования сигналом на вход S5. Затем запускается двигатель сигналом на вход F. С помощью комбинаций ключей на входах S1 и S2 выбирается нужная позиция, к которой привод должен двигаться. При сигнале на вход S1 движение идет в прямом направлении к позиции 1. При добавлении сигнала S2 движение идет в прямом направлении к позиции 3. При исчезновении сигнала с входа S1 (сигнал S2 остается) движение идет в обратном направлении к позиции 2.
Визуальное отображение работы показано на диаграмме ниже. Для примера взят энкодер на 1024 позиций на 1 оборот. Т.е. 10 оборотов равны значению 10240, 40 оборотов равны значению 40960 и 100 оборотов равны значению 102400.
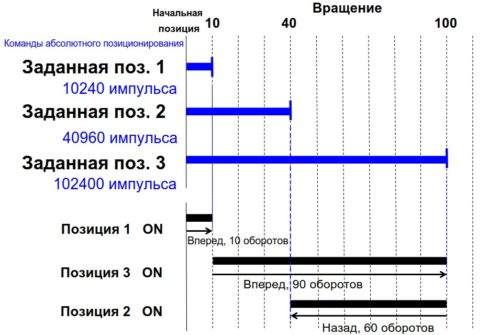
Настройка значений позиций 1, 2, 3 показана на временной диаграмме ниже. Значения задаются в сдвоенных параметрах [A544]+[A545] — позиция 1 (10240 импульсов = 10 оборотов), [A552]+[A553] — позиция 2, [A560]+[A561] — позиция 3. Параметры сдвоены для возможности ввода очень больших чисел — количества импульсов (позиций энкодера). Например, позиция 10240 разбивается на числа 1 и 0240 (по 4 цифры в каждый параметр), незначащие нули перед числом не опускаются.
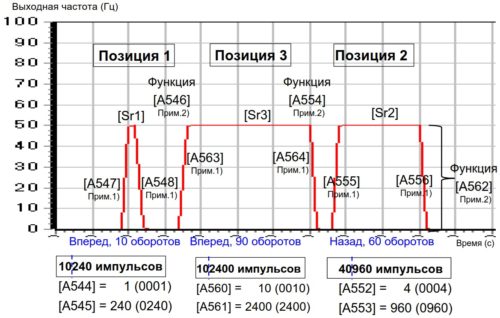
Примечание 1. Задайте корректное время разгона и торможения для режима каждой позиции с помощью параметров [A547]+[A548], [A555]+[A564], [A563]+[A556]. См. ниже.
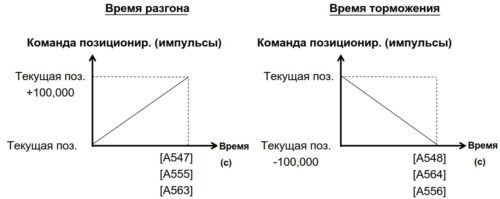
Примечание 2. С помощью параметров [A546], [A554], [A562] доступны настройки разгона/торможения:
| Значение параметра | Режим работы | Шаблон разгона/торможения | Знак |
|---|---|---|---|
| 0 | Команда абсолютного позиционирования | Линейная характеристика | Плюс |
| 1 | Команда абсолютного позиционирования | Линейная характеристика | Минус |
| 2 | Команда абсолютного позиционирования | S-образная характеристика | Плюс |
| 3 | Команда абсолютного позиционирования | S-образная характеристика | Минус |
| 4 | Команда увеличения позиции | Линейная характеристика | Плюс |
| 5 | Команда увеличения позиции | Линейная характеристика | Минус |
| 6 | Команда увеличения позиции | S-образная характеристика | Плюс |
| 7 | Команда увеличения позиции | S-образная характеристика | Минус |
В приведенном выше примере программируются только 3 позиции остановки из 7. Задаются они по аналогии с примером выше с помощью следующих параметров:
| Номер точки | Позиция (число импульсов) | Шаблон разгона/торможения | Максимальная скорость | Время разгона | Время торможения | Код включения | |||
|---|---|---|---|---|---|---|---|---|---|
| Верхние 4 цифры | Нижние 4 цифры | Сигнал S1 | Сигнал S2 | Сигнал S3 | |||||
| 1 | A544 | A545 | A546 | Sr1 | A547 | A548 | X | — | — |
| 2 | A552 | A553 | A554 | Sr2 | A555 | A556 | — | X | — |
| 3 | A560 | A561 | A562 | Sr3 | A563 | A564 | X | X | — |
| 4 | A568 | A569 | A570 | Sr4 | A571 | A572 | — | — | X |
| 5 | A576 | A577 | A578 | Sr5 | A579 | A580 | X | — | X |
| 6 | A584 | A585 | A586 | Sr6 | A587 | A588 | — | X | X |
| 7 | A592 | A593 | A594 | Sr7 | A595 | A596 | X | X | X |
Тестовые настройки для 3 позиций остановки для вышестоящего примера
| Название параметра | Значение | Описание | Пояснение |
|---|---|---|---|
| Sr1 | 50 Гц | Заданная скорость 1 | Позиция остановки 1 |
| Sr2 | 50 Гц | Заданная скорость 2 | Позиция остановки 2 |
| Sr3 | 50 Гц | Заданная скорость 2 | Позиция остановки 2 |
| F118 | 178 | Функция входной клеммы S5 | Команда готовности к позиционному контролю (PSRDY) для входа S5 |
| F362 | 6 | Коэффициент пропорциональности ПИД-регулятора | |
| F375 | 1024 | Число импульсов энкодера на 1 оборот | |
| F376 | 1 или 11 | Использование опции датчика скорости VECxxxZ | |
| F379 | 0 (5 В) | Напряжение питания энкодера | |
| F460 | 10 | Отклик контроля скорости | |
| A510 | 1 | Режим перемещения по нескольким позициям | |
| A544 | 1 | Верхние 4 цифры позиции останова 1 | Позиция задается числом импульсов датчика скорости |
| A545 | 240 | Нижние 4 цифры позиции останова 1 | Позиция задается числом импульсов датчика скорости |
| A546 | 2 | Шаблон разгона/торможения для 1 позиции | 2 это шаблон S-кривой |
| A547 | 0,01 сек | Время разгона для 1 позиции | |
| A548 | 0,01 сек | Время торможения для 1 позиции | |
| A552 | 4 | Верхние 4 цифры позиции останова 2 | Позиция задается числом импульсов датчика скорости |
| A553 | 960 | Нижние 4 цифры позиции останова 2 | Позиция задается числом импульсов датчика скорости |
| A554 | 2 | Шаблон разгона/торможения для 2 позиции | |
| A555 | 0 сек | Время разгона для 2 позиции | |
| A556 | 0 сек | Время торможения для 2 позиции | |
| A560 | 10 | Верхние 4 цифры позиции останова 3 | Позиция задается числом импульсов датчика скорости |
| A561 | 2400 | Нижние 4 цифры позиции останова 3 | Позиция задается числом импульсов датчика скорости |
| A562 | 2 | Шаблон разгона/торможения для 3 позиции | |
| A563 | 0 сек | Время разгона для 3 позиции | |
| A564 | 0 сек | Время торможения для 3 позиции |
Коэффициент пропорциональности ПИД-регулятора [F362] рассчитывается примерно так: 500 · число пар полюсов двигателя/[F375] (Число импульсов энкодера на 1 оборот)
Если для установления позиции требуется время в процессе управления позиционированием, увеличьте [F362] на 0,1. Если после установления позиции возникает вибрация, уменьшите [F362] на 0,1.
После остановки позиционирования на выходные клеммы FL_, R1_, R2_ может быть выведен сигнал завершения позиционирования при вводе соответствующие параметры [F130, F132…F134, F137…F138] числа 118 (119).
Ориентация. Точная установка угла поворота
Преобразователь частоты VF-AS3 позволяет задать угол поворота вала двигателя.
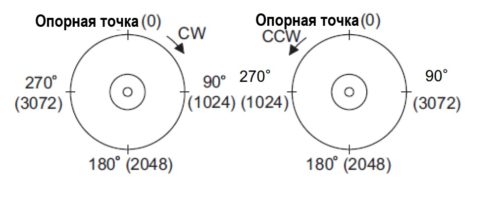
Привод может регулировать положение остановки (управление ориентацией) с помощью датчика положения (энкодера), прикрепленного к валу машины. Когда включается команда сигнала ориентации во время работы на скорости, то производится торможение до «скорости поиска точки ориентации». После этого рассчитывается «расстояние до ориентационной остановки», и, наконец, финальная остановка в заданном положении. Затем вводится состояние сервоблокировки ориентации.
Ориентация начинается по сигналу поступившему на клемму цифрового входа [F110…F124] = 190(191) (ORTST/Orientation start — старт контроля ориентации).
Подробнее о настройке системы ориентации по заданному углу
Преобразователь частоты вместо контроллера
Обычно функции позиционирования выполняются с помощью специальных модулей ПЛК. Понятно, что это дополнительные затраты как в стоимости, так и в пространстве для размещения в щите управления.
Компания СПИК СЗМА как единственный официальный дилер Toshiba предлагает купить для решения задач позиционирования частотники серии VF-AS3. Вы получаете максимально качественную техническую поддержку и гарантию долгой работы преобразователя частоты.