Описание
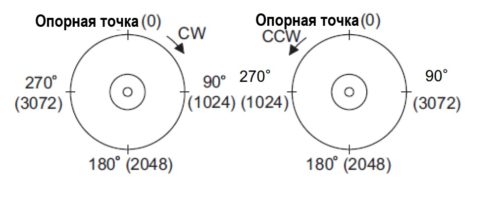
Встроенная функция ориентирования позволяет останавливать вращение вала электродвигателя в заданном углу поворота. Она позволяет применять частотный преобразователь Toshiba AS3 в системах дозирования, поворотных столах и станках.
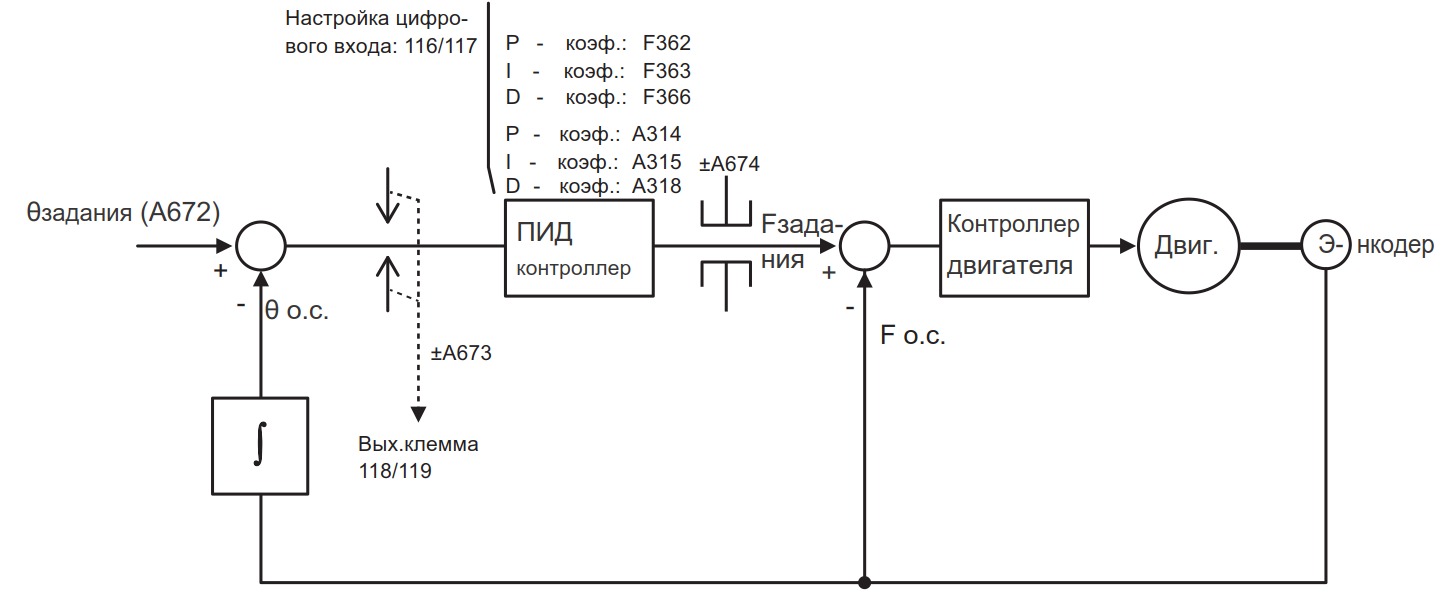
Представленная ниже схема иллюстрирует работу ПИД-регулятора для остановки двигателя в заданной позиции.
Способы инициализации угла поворота
Для работы функции ориентирования необходимо выбрать способ инициализации угла поворота. Это делается с помощью параметра [A670].
- если [A670] = 0, то при появлении сигнала на заданном дискретном входе (функция 188/189), текущий угол поворота сохраняется в параметр начальной позиции [A671]
- если [A670] = 1, то при появлении сигнала фазы Z (см. опцию энкодера), текущий угол поворота сохраняется в параметр начальной позиции [A671]
Внимание! Когда параметр [A675] > [A676] (передаточное число механизма меньше 1), не используйте [A670] = 1 (текущий угол поворота не может быть определен однозначно). Когда задан [A670] = 1, подключите от энкодера сигнал Z-фазы.
Установка важных параметров
Сделайте следующие настройки для включения контроля ориентации:
- [F359] = 3. ПИД-регулятор 1 настраивается на простое позиционирование с положительной характеристикой
- задайте число импульсов энкодера за один оборот механизма в параметре [F375]
- если энкодер находится на валу двигателя, то в параметр [F375] вводится число импульсов энкодера
- если энкодер находится на валу механизма, то в параметр [F375] вводится число «импульсов энкодера, деленное на коэффициент передачи редуктора КПР». Если «число импульсов энкодера/КПР» не является целым числом, то разность углов повороту слишком велика и использование [A670] = 0 для управления ориентацией не может быть выполнено. Для работы нужно использовать настройку [A670] = 1
- установите передаточное число редуктора машины в параметрах [A675] (числитель) и [A676] (знаменатель)
- когда энкодер на валу двигателя, задайте соотношение [A676]/[A675]
- когда энкодер на валу механизма, задайте параметры [A675] и [A676] отдельно
- задайте нужный угол поворота (ориентацию) в параметр [A672]
- подайте сигнал начала ориентации на входную клемму (заданную значением 190/191)
Процесс ориентации по углу
- подайте сигнал запуска на частотный преобразователь
- подайте сигнал на клемму начала ориентирования по углу (заданную значением 190/191)
- уменьшите скорость от текущей скорости до скорости ориентации (параметр [A674]) и запустите управление ориентацией, когда скорость ориентации стабилизируется после замедления DEC. Верхний предел частоты во время контроля ориентации составляет ± [A674]
- когда управление ориентацией завершено, а текущий угол поворота находится в пределах диапазона завершения ориентации ± [A673], то на выходную клемму (настройка: 118/119) выводится сигнал завершения позиционирования
Важно! Перед подачей сигнала начала ориентации привод должен работать с заданной скоростью и сигнал начала ориентации должен отсутствовать.
Установка коэффициентов ПИД-регуляторов
Можно переключаться между двумя ПИД-регуляторами для управления ориентацией. Первый ПИД-регулятор (коэффициент П: [F362], коэффициент И: [F363], коэффициент Д: [F366]) и второй ПИД-регулятор (коэффициент П: [A314], коэффициент И: [A315], коэффициент Д: [A318]) можно переключать с помощью сигнала переключения PID1/2 на дискретном входе (функция клеммы 116/117).
Переключение позволяет выбрать наилучший режим поиска угла положения в зависимости от разных условий работы.
Таблица основных параметров функции ориентации по углу частотного преобразователя AS3
| Параметр | Функция | Диапазон настройки | Значение по умолчанию |
|---|---|---|---|
| A670 | Выбор способа инициализации | 0 — инициализация при появлении сигнала на заданном дискретном входе (функция 188/189) 1 — инициализация при появлении сигнала фазы Z энкодера | 0 |
| A671 | Начальная позиция | 0.0 – 359.9 (°) | 0,0 |
| A672 | Задание позиции угла | 0.0 – 359.9 (°) | 0,0 |
| A673 | Погрешность угла | 0.1 – 20.0 (°) | 1,0 |
| A674 | Частота процесса ориентации | 0.1 — 10.00 (Гц) | 1,0 |
| A675 | Числитель передаточного соотношения механизма | 1 – 9999 | 1000 |
| A676 | Знаменатель передаточного соотношения механизма | 1 – 9999 | 1000 |
| F362 | Первый ПИД-регулятор (коэффициент П) | 0.01 – 100.0 | 0.30 |
| F363 | Первый ПИД-регулятор (коэффициент И) | 0.00 – 100.0 | 0.20 |
| F366 | Первый ПИД-регулятор (коэффициент Д) | 0.00 – 2.55 | 0.00 |
| A314 | Второй ПИД-регулятор (коэффициент П) | 0.01 – 100.0 | 0.30 |
| A315 | Второй ПИД-регулятор (коэффициент И) | 0.00 – 100.0 | 0.20 |
| A318 | Второй ПИД-регулятор (коэффициент Д) | 0.00 – 2.55 | 0.00 |
Входные/выходные клеммы, относящиеся к системе позиционирования по углу
| Задание клеммы | Функция | Примечание |
|---|---|---|
| 178/179 | Готов к контролю позиционирования | Входная клемма |
| 190/191 | Старт позиционирования | Входная клемма |
| 116/117 | Сигнал переключения регуляторов PID1/2 | Входная клемма |
| 118/119 | Сигнал завершения позиционирования | Выходная клемма |
| 146/147 | Управление позиционированием в действии (PID1,2 ПИД-контроль) | Выходная клемма |
Компания СПИК СЗМА как единственный официальный дилер Toshiba на территории России и стран СНГ предлагает купить для решения задач позиционирования частотники серии VF-AS3. Вы получаете максимально качественную техническую поддержку и гарантию долгой работы преобразователя частоты.