Введение
ПИД регулирование в частотнике VF-S11 Toshiba (эта серия заменена на ПЧ VF-S15) может быть настроено для управления процессом, для поддержания температуры, расхода, уровня, давления или другой измеряемой величины. Этот метод необходим, когда критические процессы должны поддерживать определенный уровень технологического параметра (заданное значение).
Регулятор ПИД использует для этого разные переменные: Пропорциональное усиление, Интегральное и Дифференциальное время, чтобы получить точное регулирование в замкнутой системе. Система управления с замкнутым контуром — это система, в которой измерение переменной (температуры, давления или потока) контролируемого процесса постоянно подается обратно в управляющее устройство (преобразователь частоты), чтобы гарантировать поддержание требуемого задания.
Схема соединений
Примечание. Обратитесь к руководству по эксплуатации преобразователя частоты VF-S11 Toshiba за относящейся к вашему преобразователю информацией о подключении. Приведенная выше схема подключения типична для двухпроводного датчика.
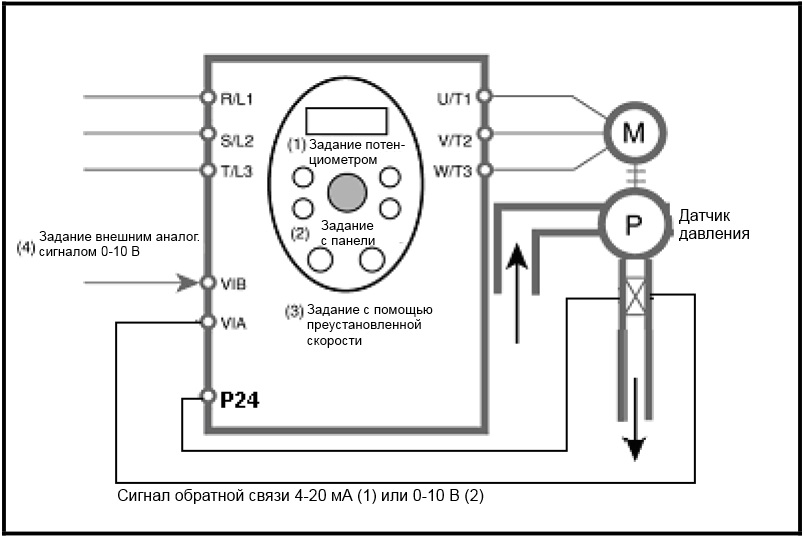
Схема наверху иллюстрирует варианты проводного соединения для приема сигналов обратной связи и различные способы ввода заданного значения на ПЧ S11.
Когда клапаны на выходе насоса открываются, давление (технологическая переменная) начинает уменьшаться. Значение уменьшения подается обратно на преобразователь частоты через сигнал обратной связи 4-20 мА. Встроенный в частотный преобразователь VF-S11 ПИД-регулятор сравнивает это значение с заданным значением и ускоряет двигатель, чтобы повысить давление до желаемого уровня.
Когда клапаны закрываются, привод уменьшает скорость двигателя насоса. Программа должна быть настроена для каждой системы путем регулировки коэффициентов пропорционального усиления, интегрального усиления и дифференциального усиления для обеспечения правильной работы регулятора.
Настройка параметров
Примечание. При нажатии кнопки MODE задается первый базовый параметр AUH. Затем нужно прокручивать вверх, пока не будет найден необходимый параметр.
| Параметр | Описание | Значение по умолчанию | Новое значение |
|---|---|---|---|
| ACC | Время ускорения 1 | 10.0 сек | 5.0 сек |
| dEC | Время замедления 1 | 10.0 сек | 5.0 сек |
| FH | Максимальная частота | 80.0 Гц | 60.0 Гц |
| UL | Верхний предел частоты | 50 Гц (WP), 60 Гц (WN, AN) | Зависит от ПЧ, обычно 50 Гц |
| LL | Нижний предел частоты | 0.0 Гц | 10.0 Гц |
Вышеприведенные настройки являются стандартными для многих приложений ОВиК. Настройки частоты нижнего предела, ускорения и скорости замедления могут различаться в зависимости от используемой системы. Для включения ПИД регулятора пользователь должен войти в расширенный список параметров.
| Параметр | Описание | Значение по умолчанию | Новое значение |
|---|---|---|---|
| F360 | Включение ПИД | 0 | 1 |
| F201 | Задание точки 1 входа VIA | 0 % | 20 % |
| F202 | Частота точки 1 входа VIA | 0.0 Гц | 0.0 Гц |
| F203 | Задание точки 2 входа VIA | 100 % | 100 % |
| F204 | Частота точки 2 входа VIA | 50.0 Гц (WP), 60.0 Гц (WN, AN) | Зависит от ПЧ, обычно 50 Гц |
Вышеприведенные настройки предполагают систему, в которой увеличение сигнала обратной связи 4-20 мА приводит к снижению выходной частоты ПЧ. Если система такая, что увеличение обратной связи должно вызывать увеличение выходной частоты, клемму входа VIA следует запрограммировать следующим образом:
| Параметр | Описание | Значение по умолчанию | Новое значение |
|---|---|---|---|
| F360 | Включение ПИД | 0 | 1 |
| F201 | Задание точки 1 входа VIA | 0 % | 100 % |
| F202 | Частота точки 1 входа VIA | 0.0 Гц | 50.0 Гц |
| F203 | Задание точки 2 входа VIA | 100 % | 20 % |
| F204 | Частота точки 2 входа VIA | 50.0 Гц (WP), 60.0 Гц (WN, AN) | 0.0 Гц |
Система также может быть запрограммирована на использование сигнала обратной связи 0-10 В постоянного тока вместо сигнала обратной связи 4-20 мА. Если предпочтителен сигнал обратной связи 0-10 В постоянного тока, используйте следующие настройки:
| Параметр | Описание | Значение по умолчанию | Новое значение |
|---|---|---|---|
| F360 | Включение ПИД | 0 | 1 |
| F210 | Задание точки 1 входа VIB | 0 % | 20 % |
| F211 | Частота точки 1 входа VIB | 0.0 Гц | 0.0 Гц |
| F212 | Задание точки 2 входа VIB | 100 % | 100 % |
| F213 | Частота точки 2 входа VIB | 50.0 Гц (WP), 60.0 Гц (WN, AN) | Зависит от ПЧ, обычно 50 Гц |
Настройка заданного значения (Set-point)
Заданное значение (set-point) — это уровень, на котором должна поддерживаться требуемая переменная процесса (например, 75 ° C или 150 атм.). Эту настройку можно задать с помощью параметра «Режим настройки частоты» (FMOD). Преобразователь частоты VF-S11 использует соотношение команды частоты к параметру максимальной выходной частоты (FH), чтобы определить значение обратной связи, которое он пытается поддерживать (заданное значение). Имейте в виду, что введенная частота редко будет рассматриваться как выходная частота. Как только ПЧ VF-S11 переведен в режим ПИД-регулирования, единственной проблемой привода будет поддержание заданного значения.
Заданное значение может быть введено различными способами: с помощью встроенного в VF-S11 потенциометра, стрелок ВВЕРХ/ВНИЗ на панели, цифровых входов с предустановленной скоростью или внешнего аналогового сигнала.
Методы установки заданного значения (Set-point):
- Задание с помощью встроенного потенциометра:
Установите параметр FMOD в 0. Отрегулируйте потенциометр на передней панели привода до требуемой уставки. - Задание с помощью внешнего аналогового сигнала (0-10V) на входной клемме VIB:
Установите параметр FMOD в 2. Отрегулируйте внешний потенциометр в соответствии с настройками, необходимыми для получения требуемого значения переменной процесса. - Задание с помощью кнопок ВВЕРХ и ВНИЗ на панели VF-S11:
Установите параметр FMOD в 3. Отрегулируйте значение задания с помощью клавиш со стрелками вверх и вниз на любое значение, необходимое для получения требуемой выходной величины. Примечание: это наиболее часто используемый метод настройки привода. - Задание с помощью предустановленной скорости и входной клеммы S1:
Установите параметр FMOD в 1 или 2. Установите заданную частоту (задание) в параметре SR1. Замкните контакты клемм S1 и CC.
Как найти заданное значение в локальном режиме (FMOD = 3):
Вам необходимо знать диапазон вашего преобразователя, чтобы определить заданное значение в приводе. Вот простой пример:
Датчик с диапазоном: 4 … 20 мА
Диапазон давления датчика: 0 … 5 Атм.
Диапазон работы частотника: 0 … 50 Гц (FH= 50 Гц)
Требуемое поддержание давления (задание): 1.5 Атм.
Заданное значение введено в привод (Гц) = 50 Гц · Задание давления (Атм.) / (Давление при 20 мА — Давление при 4 мА) = 50 Гц · 1.5 Атм. / (5 Атм. — 0 Атм.) = 15 (Гц)
Таким образом, для этого примера вы должны ввести задание = 15 Гц, используя клавиши со стрелками вверх и вниз на клавиатуре VF-S11.
Настройка ПИД-регулятора
Важная проблема с ПИД регулированием заключается в том, что если реакция на изменение переменной процесса слишком быстрая, ПЧ может перерегулировать процесс (вывести более высокую частоту, чем необходимо), в некоторых случаях могут возникнуть колебания частоты. Целью при настройке петли ПИД является минимизация времени нарастания и установления.
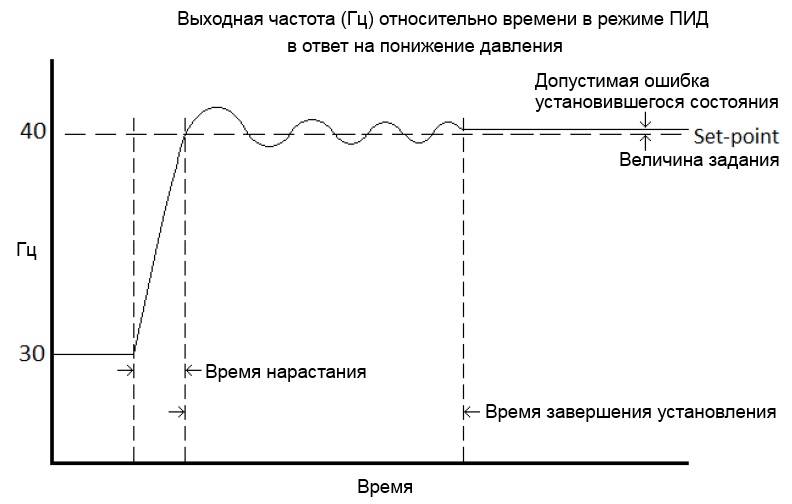
На приведенном выше рисунке показано, что подразумевается под временем нарастания (rise) и установления (settling). Предположим, что привод VF-S11 работает на частоте 30 Гц. В момент времени 0 все клапаны системы открыты. Предположим, что теперь привод должен развивать скорость до 40 Гц для поддержания требуемого давления. Время нарастания — это время, необходимое для перехода от времени 0 (изменение давления) к необходимой частоте Гц (в первый раз). Как видно из приведенного выше графика, могут быть некоторые колебания, которые, возможно, исчезают через некоторое время, называемое временем установления. Помните, что при изменении выходной частоты меняется и давление. ПОЛЬЗОВАТЕЛЬ ДОЛЖЕН ОПРЕДЕЛИТЬ ПРИЕМЛЕМОЕ ВРЕМЯ НАРАСТАНИЯ И УСТАНОВЛЕНИЯ. Время нарастания, время установления и перерегулирование зависят от настроек системы и могут быть отрегулированы путем изменения трех параметров в приведенной выше таблице программирования: пропорциональное усиление, интегральное время и дифференциальное время.
Пропорциональное усиление
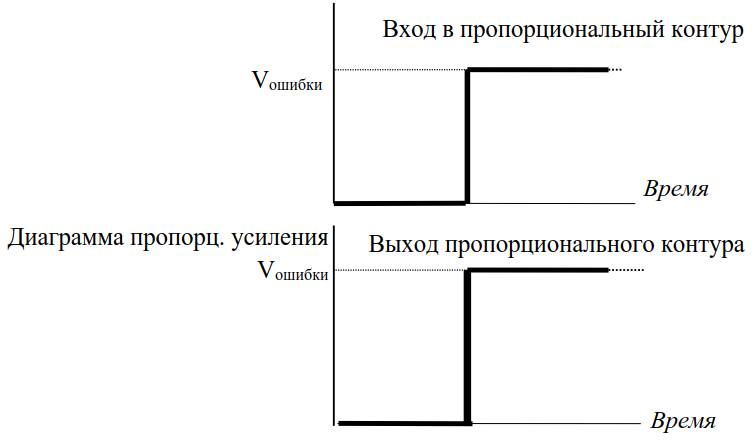
ПИД с быстро меняющимися переменными процесса имеет более высокий коэффициент пропорционального усиления, чем их аналоги для медленно меняющихся переменных процесса. Чем выше пропорциональное усиление, тем меньше будет время нарастания. С увеличением пропорционального усиления обычно происходит увеличение перерегулирования и повышается вероятность колебаний. В инверторе VF-S11 пропорциональный коэффициент задается в параметре F362 = 0.01 … 100.0.
Интегральное усиление
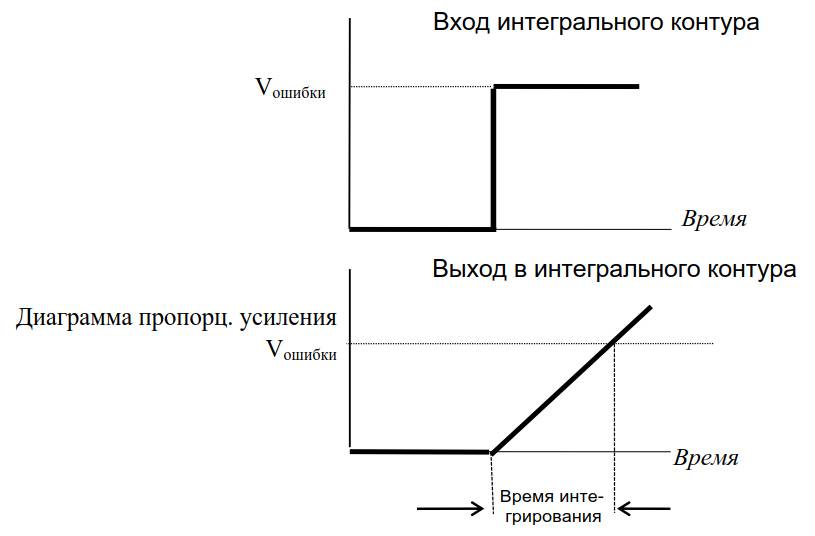
Также известное как сброс, интегральное усиление — это вовсе не усиление, а время. Интегральное время (секунды/повтор) определяет, сколько времени требуется выходу интегральной схемы с нуля до уровня, установленного выходом пропорционального контура. Следовательно, на интегральное действие влияет пропорциональное действие. Выход интегральной схемы представляет площадь под графиком Vошибки/Время. В приведенном ниже примере, если Vошибки останется на показанном уровне, выход интегральной схемы будет продолжать линейно увеличиваться со временем (выход интеграла пропорционален площади прямоугольника = время пропорционального усиления Vошибки). Чем короче интегральное время, тем сильнее будет эффект интегрального действия. Если у вас есть система, которая никогда не достигает заданного значения (имеется ошибка стационарного состояния), уменьшите время интегрирования. В инверторе VF-S11 интегральный коэффициент задается в параметре F363 = 0.01 … 100.0 (сек).
Дифференциальное усиление
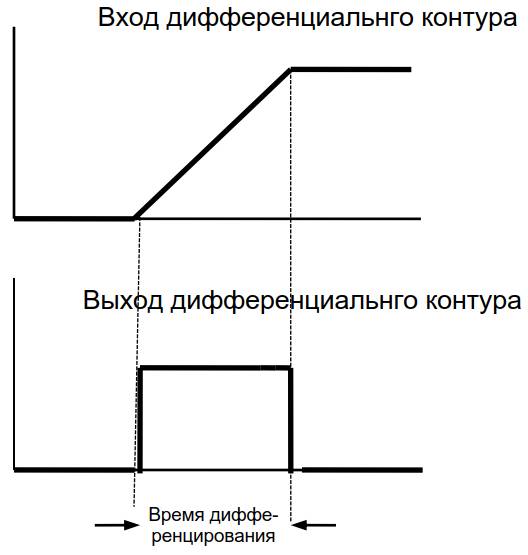
Также известное как темп изменения отклонения регулируемой величины, дифференциальное усиление — это не усиление, а время. Дифференциальный коэффициент усиления используется редко, но он помогает остановить колебания медленно изменяющихся переменных (например, температуры). Любые высокочастотные изменения в системной переменной (включая шум, если он присутствует) регистрируются дифференциальной цепью и могут привести к нестабильности. Чем дольше время разницы, тем сильнее будет действие разницы. В инверторе VF-S11 дифференциальный коэффициент задается в параметре F366 = 0.00 … 2.55 (сек).
Примечания
- Не используйте клемму VIA и параметры FNOD, F207 и F200 для назначения задания. Клемма VIA используется для сигналов обратной связи.
- При назначении параметров F130, F131 или F132 соответственно на 52 или 53, преобразователь частоты может отправить сигнал достижения соответствующей величины задания. Обратитесь к странице F-15 руководства пользователя для получения более подробной информации или свяжитесь с отделом продаж преобразователей частоты для получения дополнительной информации.
- Не забывайте выполнять настройки аналоговых входов по напряжению по мере необходимости при использовании внешнего аналогового задания (VIA) или входа обратной связи (VIA).
- Задайте параметр F359 (время ожидания ПИД-регулятора), чтобы предотвратить запуск ПИД-регулятора до того, как система управления стабилизируется. После ввода определенного времени инвертор игнорирует все входные сигналы обратной связи и работает на частоте, определяемой величиной обработки, в течение периода времени, указанного в F359.
- Следует не забывать также записать в частотник номинальный ток двигателя (F415) и число оборотов двигателя (F417).
Частотные преобразователи Toshiba
Компания СПИК СЗМА как единственный официальный дилер Toshiba в России и СНГ предлагает купить частотные преобразователи серии VF-S15 для решения задач регулирования скорости электродвигателя. Вы получаете максимально качественную техническую поддержку и гарантию долгой работы преобразователя частоты.