При возникновении проблемы проведите диагностику в соответствии с приведенными в этой статье таблицами прежде, чем связаться с компанией СПИК СЗМА.
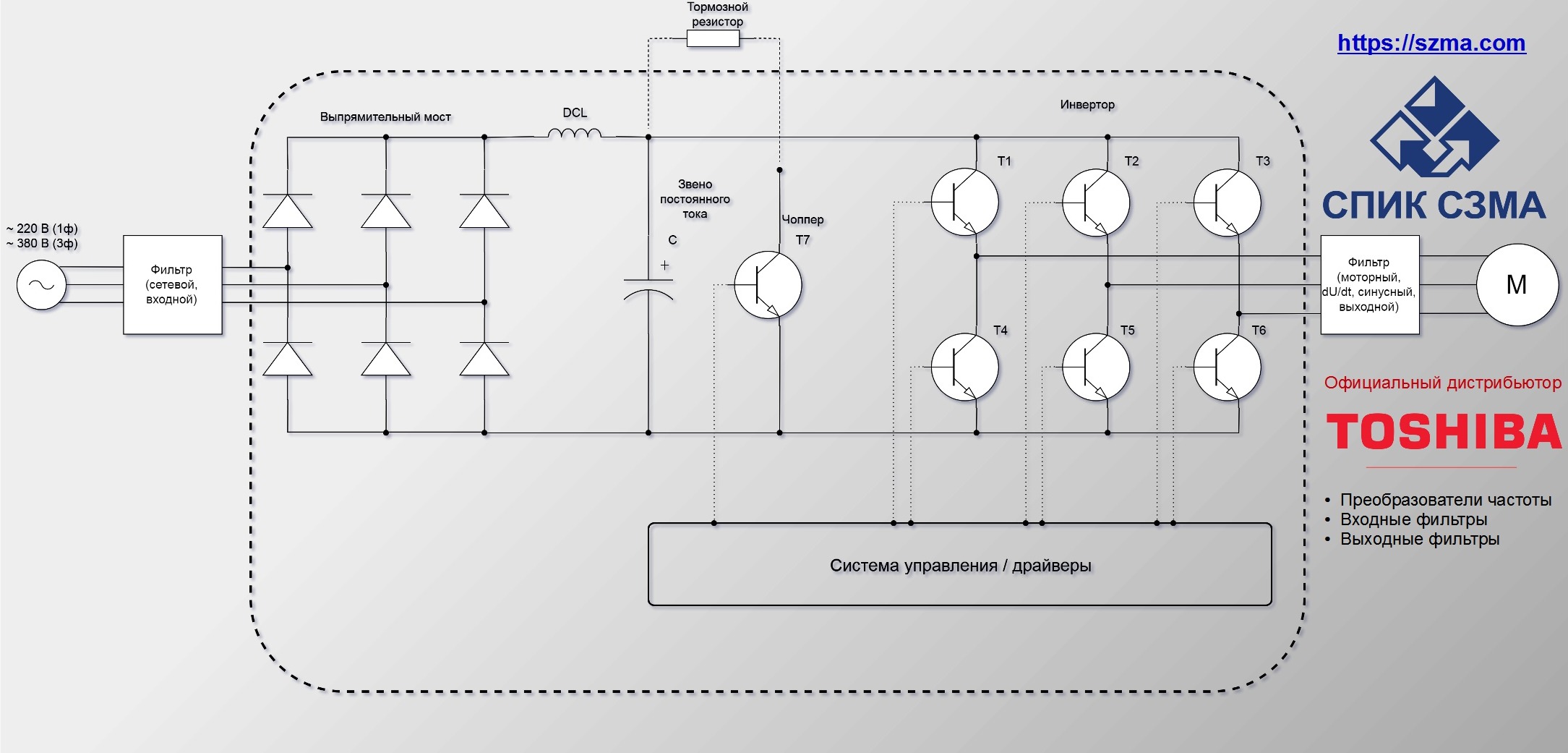
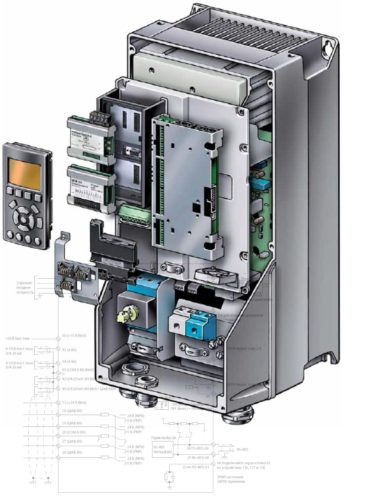
Частотные преобразователи Toshiba
Компания СПИК СЗМА как единственный официальный дилер Toshiba в России и СНГ предлагает купить частотные преобразователи серии VF-AS3 для решения задач регулирования скорости электродвигателя. Вы получаете максимально качественную техническую поддержку и гарантию долгой работы преобразователя частоты.
Большинство ошибок, аварийных и предупредительных сообщений также можно соотнести с частотниками серии S15, nC3 и AS1 Toshiba.
Описание терминов
| Аварийное отключение | Выход инвертора отключается для защиты преобразователя и внешнего оборудования. Сигнал неисправности может быть выведен на цифровой выход, если ему присвоена соответствующая функция. (По умолчанию настроен на выход [FL]). |
| Предупреждение | Предупреждает о возникновении условий, при которых продолжение работы может привести к неисправности инвертора или внешнего оборудования. Сигнал может быть выведен на цифровой выход, если ему присвоена соответствующая функция. Пониженное напряжение и т.п. отображается миганием на дисплее панели. |
| Предварительное оповещение | Состояние близко к уровню аварийного отключения. Сигнал может быть выведен на цифровой выход, если ему присвоена соответствующая функция. Символы C, P, L и H мигают на панели во время работы при перегрузке по току, перенапряжении, перегрузке по моменту и перегреве соответственно. |
| Информационное сообщение | Информация о состоянии инвертора и ошибках настройки. Не является предупреждением. |
Информация о аварийных отключениях
| Номер ошибки | Код неисправности | Наименование аварии | Возможные причины | Способы устранения |
|---|---|---|---|---|
| E | 0011 | Экстренный останов | Команда экстренного останова. 1) При управлении от источника, кроме панели управления, двойное нажатие [STOP/RESET]. 2) Сигнал на входе, которому присвоена функция экстренного останова. З) Команда экстренного останова по сети связи. |
|
| E-11 | 002B | Ошибка ответа тормоза * | Сигнал страбатывания тормоза не пришел за время <F630: Время ожидания ответа тормоза>. |
|
| E-12 | 002C | Ошибка энкодера | 1) Энкодер отключен. 2) Ошибка в подключении энкодера. 3) Неправильное напряжение энкодера. |
|
| E-13 | 002D | Ошибка аномальной скорости | 1) Для <Pt: V/f Хар-ка> = от «0» до «9»: В случае F623≠0.0, F624≠0.0 если частота не попадает в диапазон от «выходная частота — <F624>» до «выходная частота + <F623>» в течение времени <F622>. 2) Для <Pt1V/fXap-Ka> = «10» или «11» при ошибке энкодера. 3) Из-за ограничения по перенапряжению, выходная частота превышает <FH: Максимальная частота>+ 12 Гц или <FH> + <vL: Базовая частота 1> х 0.1. |
1) З)
|
| E-18 | 0032 | Обрыв аналогового входа * | Уровень сигнала на входе [II] равен или меньше <F633: уровень обрыва на входе ІІ> |
|
| E-19 | 0033 | Ошибка связи ЦПУ | Ошибка связи между управляющими ЦПУ. | Отключить и снова включить питание. Если ошибка повторяется свяжитесь с Вашим дистрибьютором Toshiba. |
| E-20 | 0034 | Превышение подъема момента | Установлено слишком высокое значение параметра подъема вращающего момента <F402: Автоматический подъем момента>. Двигатель обладает слишком низким полным сопротивлением. |
Установить параметры двигателя в соответствии с его характеристикой и проведите автонастройку. <vL: Базовая частота 1>, <v: Напряжение базовой частоты>, <F405: Номин. мощность двигателя>, <F415: Номинальный ток двигателя>, <F417: HOMMH. скорость двигателя>, <F400: Автонастройка>. |
| E-21 | 0035 | Ошибка ЦПУ 1 | Ошибка управления ЦПУ | Внутренняя ошибка инвертора. Свяжитесь с Вашим дистрибьютором Toshiba. |
| E-22 | 0036 | Ошибка Ethernet | Ошибка встроенного Ethernet. | Внутренняя ошибка инвертора. Свяжитесь с Вашим дистрибьютором Toshiba. |
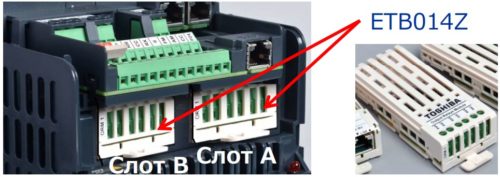
| E-23 | 0037 | Ошибка опции (слот A) | Ошибка опции, подключенной к слоту A. | Внутренняя ошибка опции. Свяжитесь с Вашим дистрибьютором Toshiba. |
| E-24 | 0038 | Ошибка опции (слот B) | Ошибка опции, подключенной к слоту B. | Внутренняя ошибка опции. Свяжитесь с Вашим дистрибьютором Toshiba. |
| E-25 | 0039 | Ошибка опции (слот C) | Ошибка опции, подключенной к слоту C. | Внутренняя ошибка опции. Свяжитесь с Вашим дистрибьютором Toshiba. |
| E-26 | 003A | Ошибка ЦПУ2 | Ошибка управления ЦПУ | Внутренняя ошибка инвертора. Свяжитесь с Вашим дистрибьютором Toshiba. |
| E-29 | 003D | Неисправность опционального блока питания цепей управления * | 1) Ошибка в опциональном блоке питания цепей управления. 2) Неправильная настройка <F647: Обнаружение неисправности опционального источника питания>. |
1) Измерить напряжение между терминалами +SU и СС. Должно быть не менее +20 В. 2) Если блок резервного питания цепей управления не подключен, установить параметр F647 = 0. |
| E-31 | 003F | Неисправность реле ограничения зарядного тока | 1) Сбой в работе реле ограничения зарядного тока. 2) Слишком часто происходит ВКЛ/ОТКЛ питания. |
1) Внутренний сбой инвертора. Свяжитесь с Вашим дистрибьютором Toshiba. 2) Вместо включения/отключения питания для Пуска/Останова использовать команду Пуск. |
| E-32 | 0040 | Неисправность PTC | 1) Активна PTC защита двигателя. 2) Сбой в цепи PTC. |
1) Проверить двигатель и датчик PTC. 2) Внутренний сбой инвертора. Свяжитесь Вашим дистрибьютором Toshiba. |
| E-37 | 0045 | Сбой серво-замка (servolock) | 1) Момент нагрузки равен или выше запирающего момента. 2) Неправильная настройка параметров. |
1) Откорректируйте нагрузку для соответствия серво-замку. 2) Установить параметры двигателя в соответствии с его характеристикой и проведите автонастройку. <vL: Базовая частота 1>, <vLv: Напряжение базовой частоты>, <F405: Номин. мощность двигателя>, <F415: Номинальный ток двигателя>, <F417: Номин. Скорость двигателя>, <F400: Автонастройка>. |
| E-38 | 0046 | Ошибка связи c тормозным модулем (для ПЧ типозазмера A6) | 1) Отключена цепь связи VF-AS3 с тормозным модулем A6. 2) Неисправность тормозного модуля A6. |
1) Проверить цепь подключения между VF-AS3 и тормозным модулем A6. 2) Отключить и снова включить питание. Если ошибка повторяется свяжитесь с Вашим дистрибьютором Toshiba. |
| E-39 | 0047 | Сбой ПМ-управления | Слишком высокий ток при автонастройке ПЧ. | Измерить индуктивность LCR-метром и установить необходимые параметры. |
| E-42 | 004A | Неиспр. охлажд. вентилятора | Неисправность встроенного вентилятора. | Необходима замена вентилятора. Свяжитесь с Вашим дистрибьютором Toshiba. |
| E-43 | 004B | Ошибка связи (встроенный Ethernet) | Превышение времени контроля обрыва связи Ethernet | Проверить оборудование и подключение Ethernet. |
| E-44 | 004C | Неисправность батареи панели управления | Активирована функция календаря в одной из ситуаций. 1) Отсутствует батарея. 2) Батарея разряжена. |
1) Вставить батарею. 2) Заменить батарею. |
| E-45 | 004D | Сбой авто настройки GD2 |
|
1) Изменить F481, F482 и повторить автонастройку. 2) Изменить F480 до 0 и установить вручную примерное значение F459. |
| E-48 | 0050 | Внутренний сбой модуля торможения для (для ПЧ типозазмера A6) | Внутренняя неисправность тормозного модуля A6. | Отключить и снова включить питание. Если ошибка повторяется свяжитесь Вашим дистрибьютором Toshiba. |
| E-99 | 0058 | Останов для теста * | Выполнен останов для теста. | Перезапустить, если проблем не обнаружено. |
| EEP1 | 0012 | EEPROM сбой 1 | Внутренняя ошибка записи данных. | Отключить и снова включить питание. Если ошибка повторяется свяжитесь с Вашим дистрибьютором Toshiba. |
| EEP2 | 0013 | EEPROM сбой 2 | 1) Питание было отключено во время установки tYP. 2) Внутренняя ошибка записи данных. |
1) Повторно установите <tYP>. Отключить и снова включить питание. Если ошибка повторяется свяжитесь с Вашим дистрибьютором Toshiba. |
| EEP3 | 0014 | EEPROM сбой 3 | Внутренняя ошибка чтения данных. | Отключить и снова включить питание. Если ошибка повторяется свяжитесь с Вашим дистрибьютором Toshiba. |
| EF2 | 0022 | Замыкание на землю* | 1) В выходном кабеле или в двигателе произошло замыкание на землю. 2) Неисправность может возникнуть в случае быстрого ускорения/останова (зависит от двигателя). |
1) Проверить кабели и обмотки двигателя на целостность изоляции. 2) Увеличить время ускорения/останова <ACC/dEC>. |
| EPHI | 0008 | Обрыв входной фазы * | Произошёл обрыв фазы во входной силовой цепи. | Проверить входные силовые линии на предмет выявления обрыва фазы. |
| EPHO | 0009 | Обрыв выходной фазы * | 1) Обрыв фазы выходной силовой цепи. 2) Выходной ток слишком мал (меньше 8%) относительно номинального тока двигателя. |
1) Проверить выходные силовые линии, двигатель и т.д. для выявления обрыва фазы. 2) Установите <F605> = 0 |
| Err2 | 0015 | Сбой RAM | Неисправность ОЗУ (RAM) основного блока | Внутренняя ошибка инвертора. Свяжитесь с Вашим дистрибьютором Toshiba. |
| Err3 | 0016 | Сбой ROM | Неисправность ПЗУ (ROM) основного блока | Внутренняя ошибка инвертора. Свяжитесь с Вашим дистрибьютором Toshiba. |
| Err4 | 0017 | Сбой А CPU1 | Неисправность CPU | Внутренняя ошибка инвертора. Свяжитесь с Вашим дистрибьютором Toshiba. |
| Err5 | 0018 | Ошибка связи (RS485) | Превышение времени контроля обрыва связи RS485. | Проверить оборудование и подключение по RS485. |
| Err6 | 0019 | Ошибка драйвера | Неисправность выходного драйвера | Внутренняя ошибка инвертора. Свяжитесь с Вашим дистрибьютором Toshiba. |
| Err7 | 001A | Ошибка измерения тока | Неисправность датчика выходного тока | Внутренняя ошибка инвертора. Свяжитесь с Вашим дистрибьютором Toshiba. |
| Err8 | 001B | Ошибка связи (опция) | Превышение времени контроля обрыва связи для опционального модуля связи. | Проверить оборудование и подключение для опционального модуля связи. |
| Err9 | 001C | Отключение панели во время работы | При управлении с панели (удаленной панели) произошло ее отключение | Проверить подключение панели управления к инввертору |
| Etn | 0028 | Ошибка автонастройки | 1) Введенные параметры двигателя не соответствуют его характеристикам. 2) Выполнение автонастройки на вращающемся двигателе. 3) Автонастройка не завершилась в течение нескольких минут |
1) Установить параметры двигателя в соответствии с его характеристикой и провести автонастройку. <vL: Базовая частота 1>, <vLv: Напряжение базовой частоты>, <F405: Номин. мощность двигателя>, <F415: Номинальный ток двигателя>, <F417: Номин. Скорость двигателя>, <F400: Автонастройка>. 2) Убедиться, что двигатель не вращается. Повторить автонастройку 3) Провести автонастройку снова и, в случае повторения ошибки, задать параметры двигателя вручную. |
| Etn1 | 0054 | Ошибка автонастройки 1 | 1) Двигатель не подключен. 2) Подключено другое устройство, не трёхфазный асинхронный двигатель. 3) Неправильно задано значение F417 |
1) и 2) Проверить подключение. 3) Установить <F417> в соответствии с характеристикой двигателя |
| Etn2 | 0055 | Ошибка автонастройки 2 | Введенные параметры двигателя не соответствуют его характеристике | 1) Установить параметры двигателя в соответствии с его характеристикой и провести автонастройку. <vL: Базовая частота 1>, <vLv: Напряжение базовой частоты>, <F405: Номин. мощность двигателя>, <F415: Номинальный ток двигателя>, <F417: Номин. Скорость двигателя>, <F400: Автонастройка>. |
| Etn3 | 0056 | Ошибка автонастройки 3 | Значения <vL: Базовая частота 1> или <F417: Номинальная скорость двигателя> не соответствуют характеристике двигателя. | Установить <vL: Базовая частота 1> или <F417: Номинальная скорость двигателя> в соответствии с характеристикой двигателя. |
| EtyP | 0029 | Ошибка типа инвертора | 1) Произошла внутренняя ошибка. 2) Была заменена плата в инверторе (силовая или управления). |
1) Внутренняя ошибка инвертора. Свяжитесь с Вашим дистрибьютором Toshiba. 2) Установить <tYP: По умолчанию> = «6: Инициализация типа». |
| OC1 | 0001 | Превышение тока (при ускорении) | 1) Слишком короткое время ускорения. 2) Неверно настроена хар-ка V/f. 3) Сигнал перезапуска подан на вращающийся двигатель после кратковременного останова. 4) Используется нестандартный двигатель (например, двигатель с небольшим импедансом). 5) Используется двигатель с низкой индуктивностью (например высокоскоростной). 6) Для <Pt> = «11», неправильная полярность знкодера. 7) При <F614: Длительность импульса определения КЗ при пуске >=»0″, и <F613> = 2 или 3, короткое замыкание на выход двигателя. |
1) Увеличить время ускорения. <АСС: Время ускорения 1> и т.д. 2) Проверить настройку параметров V/f. 3) Установить <F301: Автозапуск>. В зависимости от характеристики механизма <F302: Управление за счет регенерации энергии> = «1» также эффективно. 4) Для <Pt>=»0 «, «1», «2» или «7» уменьшить <vb: ручной подъем момента 1>. Для других <Pt> выполнить автонастройку <F400>. <F402: Автоматический подъем момента> установить в соответствии с двигателем. 5) Использовать инвертор большей мощности. |
| OC2 | 0002 | Превышение тока (при торможении) | 1) Слишком короткое время торможения. 2) Используется двигатель с низкой индуктивностью (например высокоскоростной). 3) Для <Pt> = «11», неправильная полярность знкодера. 4) При <F614: Длительность импульса определения КЗ при пуске >=»0″, и <F613> = 2 или З, короткое замыкание на выход двигателя. |
1) Увеличить время торможения. <dEC: Время останова 1>, и т.п. 2) Использовать инвертор большей мощности. |
| OC3 | 0003 | Перегрузка по току при работе на постоянной скорости | 1) Резкое изменение нагрузки 2) Нагрузка длительно превышает номинальное значение. 3) Используется двигатель с низкой индуктивностью (например высокоскоростной). 4) Для <Pt> = «11», неправильная полярность энкодера. 5) При <F614: Длительность импульса определения КЗ при пуске >=”0″ и <F613> = 2 или З, короткое замыкание на выход двигателя. |
1) Исключить колебания нагрузки. 2) Проверить исправность механизма. З) Использовать инвертор большей мощности. |
| OCA1 | 0005 | Перегрузка по току на выходе (фаза U) | Неисправность IGBT в фазе U. | Внутренняя ошибка инвертора. Свяжитесь с Вашим дистрибьютором Toshiba. |
| OCA2 | 0006 | Перегрузка по току на выходе (фаза V) | Неисправность IGBT в фазе V. | Внутренняя ошибка инвертора. Свяжитесь с Вашим дистрибьютором Toshiba. |
| OCA3 | 0007 | Перегрузка по току на выходе (фаза W) | Неисправность IGBT в фазе W. | Внутренняя ошибка инвертора. Свяжитесь с Вашим дистрибьютором Toshiba. |
| OCL | 0004 | Перегрузка по току в нагрузке при пуске | 1) Короткое замыкание на выходе. 2) Нарушение изоляции в кабеле или двигателе. 3) Низкий импеданс двигателя. |
1) Проверить подключение на выходе. 2) Проверить изоляцию на выходе. 3) Установить <F613: Контроль КЗ при старте >= «2» или «3». |
| OCr | 0024 | Перегрузка по току (Тормозной резистор) | 1) Когда в <F304: Динамич.торможение, OLг> установлено «Разрешено» : — Тормозной резистор не подключен. — Обрыв цепи резистора. — Сопротивление подключенного тормозного резистора меньше минимально допустимого. 2) Закорочены терминалы РВ, РС/- З) Неисправность IGBT в цепи управления динамическим торможением. |
1) Проверить подключение и правильный выбор резистора. Если он не нужен, установить «Отключено» в <F304>. 2) Проверить сопротивление резистора и качество подключения. З) Внутренняя ошибка инвертора. Свяжитесь с Вашим дистрибьютором Toshiba. Эта ошибка не может быть сброшена. Для перезапуска отключите и снова включите питание. |
| OH | 0010 | Перегрев | 1) He работает охлаждающий вентилятор. 2) Слишком высокая окружающая температура. З) Вентиляционные отверстия заблокированы. 4) Рядом с инвертором установлено тепловыдепяющее устройство. |
1) Заменить вентилятор. 2) Снизить окружающую температуру. Возобновить работу после того, как инвертор охладился. З) Разблокировать вентиляционные отверстия. 4) Убрать другие тепловыдепяющие устройства от инвертора. |
| OH2 | 002E | Внешняя термозащита * | Поступип сигнал от внешней термозащиты. | Убедиться, что двигатель не перегревается |
| OL1 | 000D | Перегрузка (Инвертор) | 1) Слишком быстрый разгон. 2) Величина постоянного тока торможения слишком велика. 3) Неверно настроена хар-ка V/f. 4) Сигнал перезапуска подан на вращающийся двигатель после кратковременной остановки и т.д. 5) Нагрузка слишком велика. |
1) Увеличить время ускорения. 2) Проверить параметры V/f характеристики. З) Установить <F301: Автозапуск>. В зависимости от характеристики механизма <F302: Управление за счет регенерации энергии> = «1» также эффективно. 4) Снизить ток торможения <F251> и время торможения <F252>. 5) Установить инвертор большей мощности. |
| OL2 | 000E | Перегрузка (Двигатель) * | 1) Двигатель заблокирован. 2) Длительная работа на малой скорости 3) Двигатель перегружен. 4) Настройка электронной термозащиты не соответствует характеристике двигателя. 5) <Pt: V/f характеристика> не соответствует механизму. |
1) Проверить механизм. 2), 3) и 4) Привести электронную термозащиту в соответствие с двигателем.<OLM: Характеристика защиты двигателя>, <tHrA: Ток защиты от перегрузки 1>, и т.п. 5) Установить <Pt: V/f характеристика> в соответствии с механизмом |
| OL3 | 003E | Перегрузка (IGBT) | 1) При работе на малой скорости (15 Гц или менее) с высокой несущей частотой возникает перегрузка. 2) Кратковременный сбой питания и пуск на вращающийся двигатель. |
1)
|
| OLr | 000F | Перегрузка (Тормозной резистор)* | 1) Величина момента инерции нагрузки слишком велика. 2) Слишком быстрое торможение. |
|
| OP1 | 000A | Перенапряжение (Во время ускорения) | 1) Недопустимые колебания входного напряжения 2) Следующие особенности подключения: — Мощность сети больше 500 кВА. — Используется конденсатор, улучшающий коэффициент мощности — K той же сети питания подключена тиристорная система 3) Сигнал перезапуска подан на вращающийся двигатель после кратковременной остановки и т.д. |
1) Использовать при номинальном напряжении питания. Исключить проблемы с входным напряжением или установить входной дроссель. 2) Подключить соответствующий входной дроссель(опция). 3) Установить <F301: Автозапуск>. В зависимости от характеристики механизма <F302: Управление за счет регенерации энергии> = «1» также эффективно. |
| OP2 | 000B | Перенапряжение (Во время торможения) | 1) Время торможения слишком мало (или велика регенеративная энергия). 2) Функция <F305: Ограничение перегрузок по напряжению> отключена. 3) Недопустимые колебания входного напряжения. 4) Следующие особенности подключения: — Мощность сети больше 500 кВА. — Используется конденсатор, улучшающий коэффициент мощности — K той же сети питания подключена тиристорная система |
1)
3) Использовать при номинальном напряжении питания. Исключить проблемы с входным напряжением или установить входной дроссель. 4) Подключить соответствующий входной дроссель(опция). |
| OP3 | 000C | Перенапряжение (при работе на постоянной скорости) | 1) Недопустимые колебания входного напряжения 2) Следующие особенности подключения: — Мощность сети больше 500 кВА. — Используется конденсатор, улучшающий коэффициент мощности — K той же сети питания подключена тиристорная система 3) Двигатель находится в генераторном режиме из-за того, что нагрузка вынуждает двигатель вращаться с частотой более высокой, чем выходная частота инвертора. |
1) Использовать при номинальном напряжении питания. Исключить проблемы с входным напряжением или установить входной дроссель. 2) Подключить соответствующий входной дроссель(опция). 3) Установить тормозной резистор (опция). |
| Ot | 0020 | Перегрузка по моменту * | Момент нагрузки во время работы превышает уровень обнаружения перегрузки no моменту. |
<F616: Уровень контроля перегрузки при работе>, <F617: Уровень контроля перегрузки при торможении>, <F618: Время контроля перегрузки>. |
| Ot2 | 0041 | Перегрузка по моменту 2 | 1) Выходной ток при работе достигает <F601: Уровень предотвращения останова 1> или выше в течение времени <F452: Время контроля предотвращения останова в двигательном режиме>. 2) Момент в двигательном режиме достигает <F441: Уровень ограничения момента 1> или выше, и вышло время <F452> . |
|
| OtC3 | 0048 | Перегрузка по моменту / Перегрузка по току * | Перегрузка по моменту или по току при мониторинге ударой нагрузки. |
|
| PrF | 003B | Ошибка цепи STO | Ошибка в цепи безопасного отключения (ЅТО). | Внутренняя ошибка инвертора. Свяжитесь с Вашим дистрибьютором Toshiba. |
| SOUT | 002F | Step-out ПМ- двигателя* | 1) Быстро меняется нагрузка. 2) Происходит внезапное ускорение/замедление. 3) Вал двигателя зафиксирован. 4) Сбой входной фазы инвертора. |
1) и 2) Увеличить время ускорения/замедления. <АСС: Время ускорения 1>, <dEC: Время останова 1>, и т.п. 3) Проверить двигатель и устранить блокировку. 4) Проверить подключение на выходе. |
| UC | 001D | Низкий ток * | Выходной ток снижается до уровня диагностики no минимальному току. |
|
| UP1 | 001E | Пониженное напряжение (Силовая цепь) | Входное напряжение (силовая цепь) уменьшилось. |
|
| Ut | 003C | Низкий момент* | Момент нагрузки достиг уровня контроля низкого момента. |
F652: Уровень контроля низкого момента в двигательном режиме>, <F653: Уровень контроля низкого момента в генераторном режиме>, <F654: Время контроля низкого момента>. |
| UtC3 | 0049 | Низкий момент / низкий ток* | Низкий момент или низкий ток при мониторинге ударных нагрузок. |
|
* Примечание : Указанный параметр контроля аварии может быть включен или отключен.
Информация о предупреждениях
| Код предупреждения | Наименование | Возможные причины | Способы устранения |
|---|---|---|---|
| A-09 | Ошибка подключения панели оператора | Обрыв кабеля между инвертором и панелью управления во время работы под управлением панели управления или удаленной панели. | Проверить подключение панели к инвертору. |
| A-17 | Сбой кнопки панели оператора |
|
Проверить панель управления. Если ошибка повторяется, свяжитесь C Вашим дистрибьютором Toshiba. |
| A-18 | Ошибка подключения аналогового входа | Значение сигнала на входе [II] меньше или равно <F633: Уровень контроля обрыва входа ІІ> . |
|
| A-43 | Ошибка связи (встроенный Ethernet) | Произошли какие-либо ошибки связи. | Меры аналогичны ситуации с «E-43». |
| COFF | Пониженное напряжение внешнего источника питанияцепи управления |
|
|
| MOFF | Пониженное напряжение в силовой цепи | Снизилось входное напряжение (силовая цепь). | Проверить входное напряжение. Если проблем не обнаружено свяжитесь с Вашим дистрибьютором Toshiba. |
| PrA | Активировано ЅТО |
|
|
| t | Ошибка связи (RS485, опция) | Произошли какие-либо ошибки связи. | Принять меры по аналогии с ситуацией «Err5» и «Егг8». |
| tUn1 | Ошибка при самообучении работе с внешним тормозом |
|
|
| tUn3 | Ошибка при самообучении при ВРМН | Неправильно настроены параметры двигателя | Установите параметры в соответствии с двигателем. |
Предварительное оповещение
| Символ оповещения | Наименование | Возможные причины | Способы устранения |
|---|---|---|---|
| C | Оповещение о перегрузке по току | Состояние близко к перегрузке по току | Принять меры, как при перегрузках по току «OC1», «OC2» и «OCЗ». |
| H | Оповещение о перегреве | Состояние близко к перегреву | Принять меры, как при перегреве «OH». |
| L | Оповещение о перегрузке двигателя | Состояние близко к перегрузке | Принять меры, как при перегрузках «OL1», «OL2» И «OL3» |
| P | Оповещение о перенапряжении | Состояние близко к перенапряжению | Принять меры, как при перенапряжении «OP1», «OP2» И «OP3» |
Информационные сообщения
| Код сообщения | Наименование | Описание | Комментарии |
|---|---|---|---|
| A-01 | Ошибка 1 установки V/f 5-точек | При <Pt:V/f Xap-Ka> = «7: V/f 5-точек», для двух или более из <vL>, <F190>, <F192>, <F194>, <F196> и <F198> заданы одинаковые (не равные 0.0 Гц) значения. | Задайте различные значения для разных параметров |
| A-02 | Ошибка 2 установки V/f 5-точек | Слишком большой наклон V/f. |
|
| A-05 | Ошибка установки базовой частоты | Попытка работы на частоте, превышающей базовую более чем в 10 раз |
|
| ASIA | Настройки для Азии | В стартовом меню выбраны настройки для Азии | |
| Atn | При автонастройке | Идет автонастройка | Сообщение информирует о работе в режиме автонастройки. Должно пропасть через несколько секунд. |
| CHn | Настройка для Китая | В стартовом меню выбраны настройки для Китая. | |
| db | Торможение ПТ | Процесс торможения постоянным током | |
| dbOn | Работа в режиме удержания вала | Активен процесс удержания вала двигателя | Отображает работу в режиме фиксации вала. При команде останова по входу ЅТ управление прекратится. |
| E1 | Переполнение панели на одну цифру | Переполнение числового отображения дисплея панели на одну цифру. | |
| E2 | Переполнение панели на две цифры | Переполнение числового отображения дисплея панели на две цифры. | |
| E3 | Переполнение панели на три цифры | Переполнение числового отображения дисплея панели на три цифры. | |
| EASy | Режим Easy | Переключено на [Режим Easy]. | |
| End | Последние данные | Последнее событие <Функции истории>. | |
| EOFF | Задействована команда экстренного останова | Произошло однократное нажатие кнопки [STOP/RESET] при режиме управления с панели | Для выполнения экстренного останова нажать [STOP] еще раз. Для отмены нажмите любую другую кнопку. |
| Err1 | Ошибка в настройке точек задания | Значения точек 1 и 2 задания частоты расположены слишком близко друг к другу. | Увеличить разницу в настройках точек задания. |
| EU | Настройки для Европы | В стартовом меню выбраны настройки для Европы | |
| FAIL | Ошибка пароля | Значение, введенное в параметре <F739: Проверка пароля>, не совпадает с <F738: Установка пароля>. | |
| FlrE | Принудительная работа на экстренной скорости | Происходит работа на экстренной скорости. (Попеременно отображаются «FlrE» и выходная частота.) | Сообщение отображает информацию о работе на экстренной скорости. Прекращается после отключения питания. |
| FJOG | Толчковый Вперед | Вращение вперед в толчковом режиме | |
| HEAd | Начало данных | Первые данные <Функции истории>. | |
| HI | Верхний предел задания | Достигнут верхний предел величины задания | |
| Init | Процесс инициализации |
|
Все в порядке, если через несколько секунд будет отображаться «0.0». |
| JP | Настройки для Японии | В стартовом меню выбраны настройки для Японии | |
| LO | Нижний предел задания | Достигнут нижний предел величины задания | |
| LStP | Функция сна | Произошел останов после длительной работы на малой скорости (функция сна) | |
| n— | Нет подробной информации о последних аварийных остановах | Подробная информация о последнем аварийном останове отображается при нажатии на [OK] при поочередном отображении «nErr» и значения. | Обычный режим отображения |
| nErr | Нет ошибок | Нет записей о последних аварийных остановах. | |
| OFF | Нет сигнала Готовности (ЅТ) | Нет сигнала на входе, которому присвоена функция готовности | |
| PASS | Пароль совпадает | Значение, введенное в параметре <F739: Проверка паропя>, совпадает с <F738: Установка пароля>. | |
| rJOG | Толчковый Назад | Вращение назад в толчковом режиме | |
| rtry | Процесс повторного пуска | Инвертор находится в процессе повторного пуска / поиска скорости. | |
| SEt | Требуется выбрать регион |
|
Выбрать регион в стартовом меню |
| Srvo | Работает серво-замок (servolock) | Включен серво-замок (servolock) вала двигателя | |
| Std | Режим настроек | Выбран [Режим настроек]. | |
| StOP | Торможение при сбое питания | Происходит останов торможением при отключении питания | Для возобновления работы необходимо v снова подать сигнал Пуска |
| tUn | Процесс обучения | Преобразователь частоты находится в режиме автонастройки параметров высокоскоростной работы на малой нагрузке или внешнего тормоза. | |
| tUn2 | Ошибка при обучении высокоскоростной работе | Произошел сбой во время автонастройки параметров режима высокоскоростной работы на малой нагрузке. | |
| U— | Идет поиск | Идет поиск по условиям в <Измененные параметры, поиск и редактирование>. | |
| U—F | Идет поиск вперед | Идет поиск вперед по условиям в <Измененные параметры, поиск и редакт>. | |
| Undo | Все кнопки разблокированы | Когда в <F737: Блокировка кнопок панели> установлено «Заблокировано» и нажата [OK] на 5 или более секунд. | Действие кнопок на панели управления временно разблокировано. |
| U—r | Идет поиск назад | Идет поиск назад по условиям в <Измененные параметры, поиск и редакт>. | |
| USA | Настройки для Сев.Америки | В стартовом меню выбраны настройки для Сев.Америки |